



- Home
- /
- News
- /
- Industry News
What are the performance benefits of 5-phase stepper motors?

Stepper motors are often categorized by the number of phases in their construction, with 2-phase and 5-phase versions being common designs. And although 2-phase versions are more widely adopted, 5-phase stepper motors offer performance advantages that make them the preferred choice in some applications.
The basic construction of a hybrid stepper motor includes two rotor cups, each with 50 teeth. The rotor cups are magnetized axially by a permanent magnet, so that the teeth of one cup are all north poles and the teeth of the other cup are all south poles. With 50 teeth per rotor cup, the pitch, or distance between teeth, is 7.2° (360° ÷ 50 = 7.2°). The two rotor cups are offset by ½ tooth pitch, so the combination of the two cups acts as a 100-tooth rotor, with 50 pole pairs (50 sets of north-south teeth).
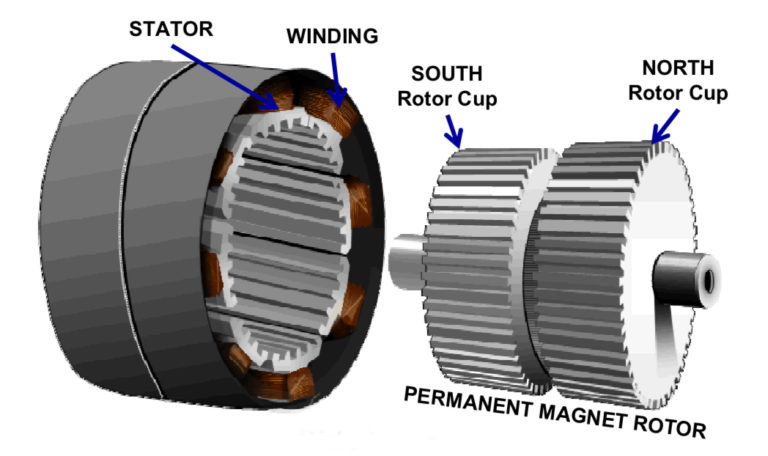
The stator is made up of toothed poles, and each pole has a winding. In the case of a 5-phase stepper motor, there are ten poles, so that each of the five phases consists of two poles, orientated at 180° to each other. When current is applied to a phase, the two poles in that phase are energized and magnetized as both north or both south.
The rotor and stator construction of a 5-phase stepper motor means that each pulse of current moves the rotor by 1/10 of a tooth pitch, for a step angle of 0.72°.
This small step angle translates to higher resolution than 2-phase motors, which have a step angle, or resolution, of 1.8°. Dolin can further reduce the resolution of a 5-phase stepper motor by 250 times, for a step angle as small as 0.00288°.
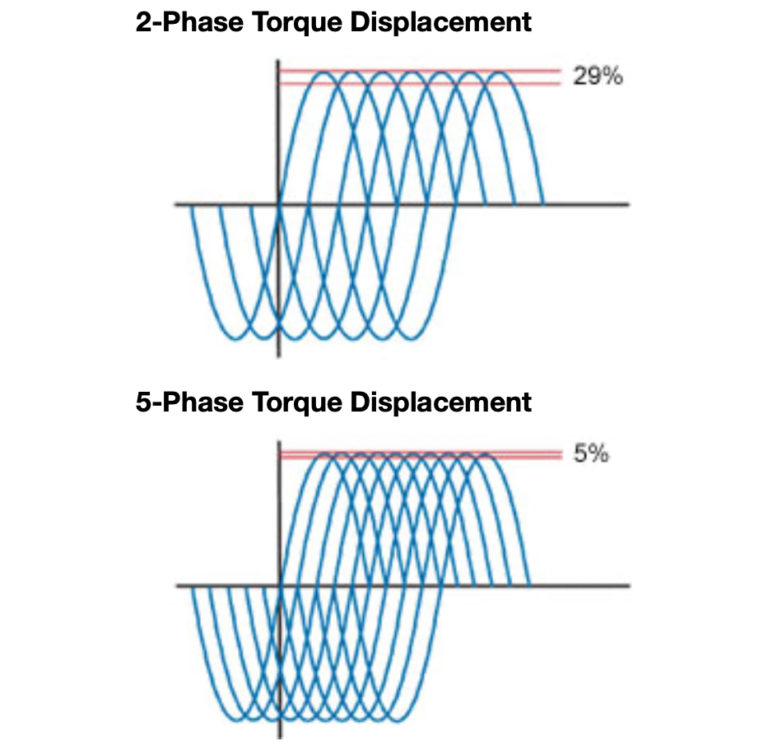
Five-phase stepper motors also have less torque ripple, and in turn, more usable torque than other designs. The torque produced by each phase contributes to the total output torque of the motor. As each phase is energized and the rotor moves, a sinusoidal torque-versus-displacement curve is produced. The difference in the curves for each phase represents the torque ripple of the motor. The more phases that contribute to total torque, the smaller the difference in the torque-versus-displacement curves, and the lower the torque ripple. Lower torque ripple also means more usable torque, lower vibration, and less noise.
One of the drawbacks of stepper motors is that they can lose synchronism if they overshoot (take too many steps) or undershoot (miss steps). In other words, the motor can physically gain or lose steps in relation to the drive’s commands, and without a feedback device, the drive can’t detect the motor’s incorrect position.

But with 5-phase stepper motors, losing synchronism is much less likely, because it requires that the rotor either overshoot by more than ½ tooth pitch or undershoot by less than ½ tooth pitch. Since ½ tooth pitch is 3.6°, and the step angle of a 5-phase stepper motor is 0.72°, the motor would have to overshoot or undershoot by 5 steps (3.6° ÷ 0.72° = 5 steps) before it loses synchronism — an unlikely scenario in most properly sized applications.
The stator is made up of toothed poles, and each pole has a winding. In the case of a 5-phase stepper motor, there are ten poles, so that each of the five phases consists of two poles, orientated at 180° to each other. When current is applied to a phase, the two poles in that phase are energized and magnetized as both north or both south.
The rotor and stator construction of a 5-phase stepper motor means that each pulse of current moves the rotor by 1/10 of a tooth pitch, for a step angle of 0.72°.
Step angle = 360° ÷ (2 * # stator phases * # rotor pole pairs)
Step angle = 360° ÷ (2 * 5 * 50) = 0.72°
This small step angle translates to higher resolution than 2-phase motors, which have a step angle, or resolution, of 1.8°. Dolin can further reduce the resolution of a 5-phase stepper motor by 250 times, for a step angle as small as 0.00288°.
Five-phase stepper motors also have less torque ripple, and in turn, more usable torque than other designs. The torque produced by each phase contributes to the total output torque of the motor. As each phase is energized and the rotor moves, a sinusoidal torque-versus-displacement curve is produced. The difference in the curves for each phase represents the torque ripple of the motor. The more phases that contribute to total torque, the smaller the difference in the torque-versus-displacement curves, and the lower the torque ripple. Lower torque ripple also means more usable torque, lower vibration, and less noise.
One of the drawbacks of stepper motors is that they can lose synchronism if they overshoot (take too many steps) or undershoot (miss steps). In other words, the motor can physically gain or lose steps in relation to the drive’s commands, and without a feedback device, the drive can’t detect the motor’s incorrect position.
But with 5-phase stepper motors, losing synchronism is much less likely, because it requires that the rotor either overshoot by more than ½ tooth pitch or undershoot by less than ½ tooth pitch. Since ½ tooth pitch is 3.6°, and the step angle of a 5-phase stepper motor is 0.72°, the motor would have to overshoot or undershoot by 5 steps (3.6° ÷ 0.72° = 5 steps) before it loses synchronism — an unlikely scenario in most properly sized applications.
Key: Vertical 3 Phase ac induction motors, electric motor, Vertical Inverter Duty motor, DC Brake motor Oil Pressure Motor, helical gear motor, AC mini Induction DC gear motor, Gear reducer motor series, NMRV NRV worm reducer series, Worm reducer series, Horizontal Inverter duty, worm gear series, ac motor, vertical gearmotor, helical horizontal gearmotor, gear reduce motor, bevel gearmotor, cyclo gear motor, NMRV gear motor, worm reducer
Newer articles
- How to calculate required input power for a gearmotor (05/11/2020)
- How to Select a Gearmotor in Four Simple Steps (07/11/2020)
- What are gearmotors and what do they do? (09/11/2020)
- What is pole count and why does it matter? (10/11/2020)
- Difference Between AC and DC Motor (05/11/2020)
- Which types of DC motors can be used as servo motors? (03/11/2020)
- What are double- and triple-stack hybrid stepper motors ? (30/10/2020)
- What are electromagnetic power-off brakes and where are they used? (01/11/2020)
- What are multi-stage gearboxes and when are they used? (02/11/2020)
- What are different ways to express a gear ratio? (29/10/2020)
Older articles
- Single-phase, two-phase and three-phase motors: all you need to know (28/10/2020)
- How Does A Brushless Electric Motor Work? (20/10/2020)
- Steps to calculate a gear ratio (26/10/2020)
- Applications and advantages of using gear motors (24/10/2020)
- AC Gear Motors leveraging Torque-Boosting Power (23/10/2020)
- Gears and gearmotor trends — more customized designs (21/10/2020)
- Gearboxes and Geared motors (20/10/2020)
- What Are Gear Motors? (22/10/2020)
- Everything to Know About Worm Gears and the Benefits of Collaborating With A Manufacturer (19/10/2020)
- What are common gearmotor types and variations? (17/10/2020)
Join